
行業應用 | 機器人及數控機床研發中的仿真技術應用
2018-03-09 by:CAE仿真在線 來源:互聯網
以機器人及數控機床為主體的智能裝備行業研發涉及的研發問題眾多,從物理學的角度來講,智能裝備研發涉及的學科領域如下圖所示:
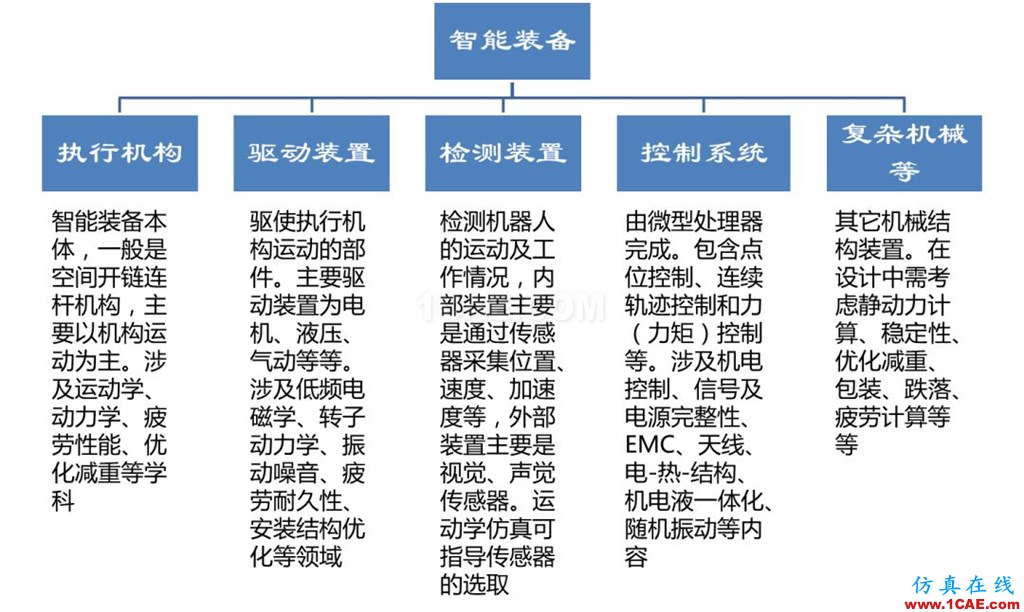
通過仿真可以在設計前期發現產品問題,并提供改進方向。整體來說,智能裝備行業的主要CAE問題包括:
-
靜力學分析:整體結構及零部件的強度、剛度、穩定性等分析等;
-
動力學分析:結構的振動頻率、噪音、隨機振動、轉子動力學等
-
機構運動分析:機構的運動軌跡、速度、加速度、關節力計算等
-
低頻電磁場分析:電路級和系統級的機電控制的仿真和優化等
-
高頻電磁場分析:PCB板級和設備級的信號完整性、電源完整性和電磁兼容分析等
-
疲勞分析:反復受力部件的疲勞性能及耐久性計算等
-
優化分析:結構的拓撲形狀及尺寸優化減重等
-
復合材料分析:復合材料的鋪層強度計算、鋪層優化等
-
跌落碰撞分析:包裝可靠性、碰撞、跌倒、跌落研究等等
-
多物理場分析:電子設備的電熱結構耦合、機電液一體化(子)系統級運動分析等
機床解決方案
機床行業 7 大關鍵技術:(1)全柔性的滾珠絲桿模型(2)全柔性的線性滑軌模型(3)切削力的便捷定義(4)響應分析(FRA)(5)機床顫振分析(6)機床零部件疲勞耐久分析(7)機 - 電 - 控一體耦合技術
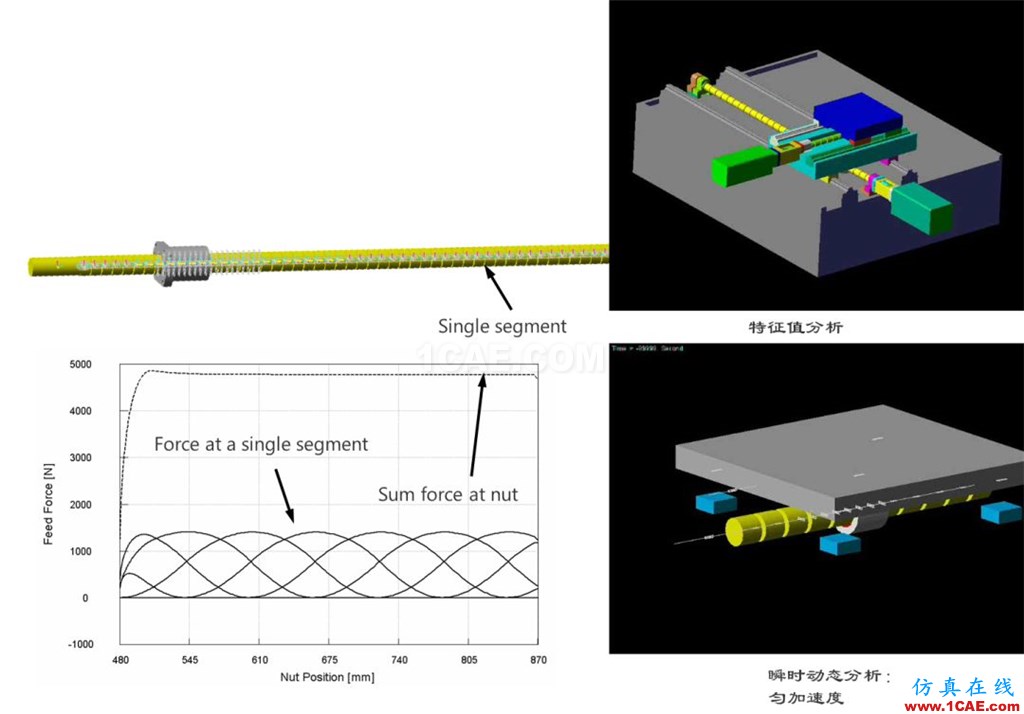
(1)全柔性的滾珠絲桿模型
-
自動將力和力矩從一個單元“移交”到下一個單元
-
類似運行用戶子程序
-
RecurDyn定義力單元:矩陣力
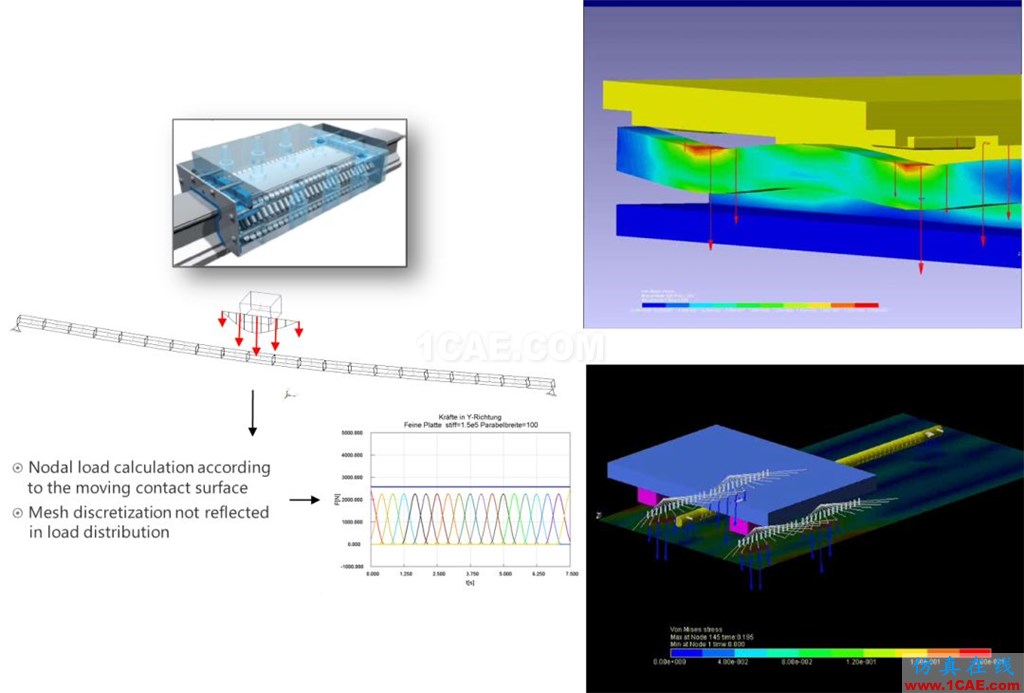
(2)全柔性的線性滑軌模型
-
自動將荷載用拋物線分布方式傳遞到滑軌節點上,并自動修正剛度
-
RecurDyn MachineTool根據用戶定義的參數(如導軌的剛度,幾何尺寸……)自動創建力矩陣單元
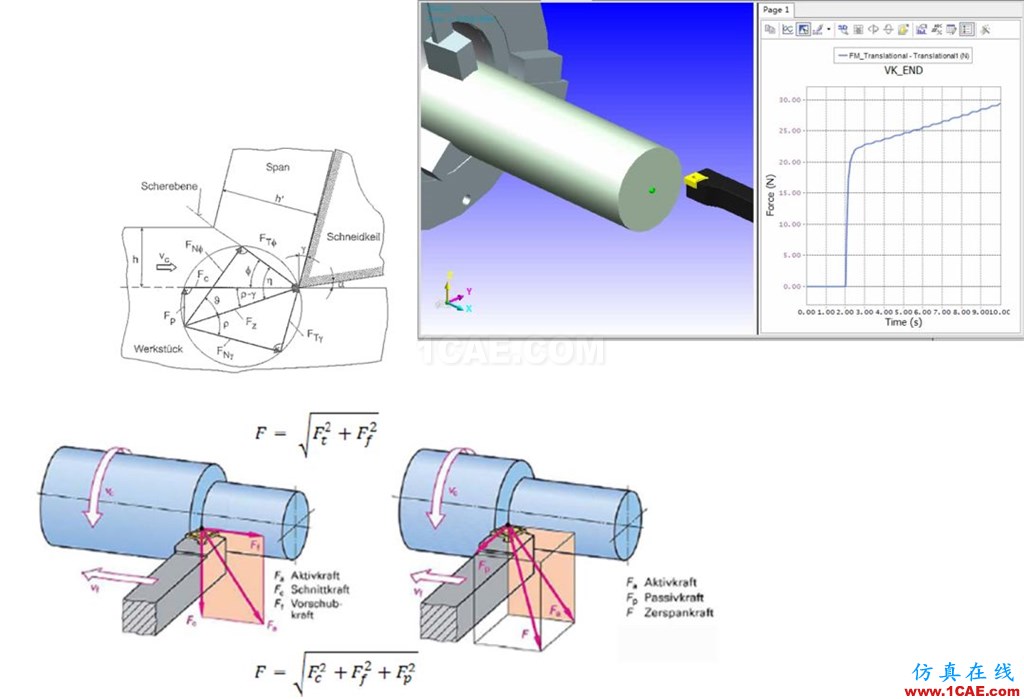
(3)切削力的便捷定義
(4)響應分析(FRA)
-
通過不同的振動激勵(如沖擊錘、激振器等)測試機床的結構特性
-
目標改進機床的傳遞特性,優化機床的性能
-
RecurDyn驗證
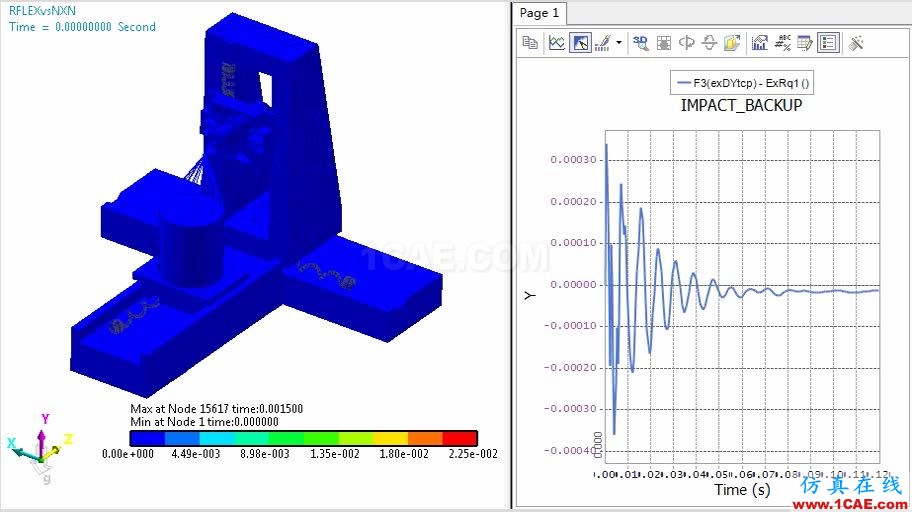
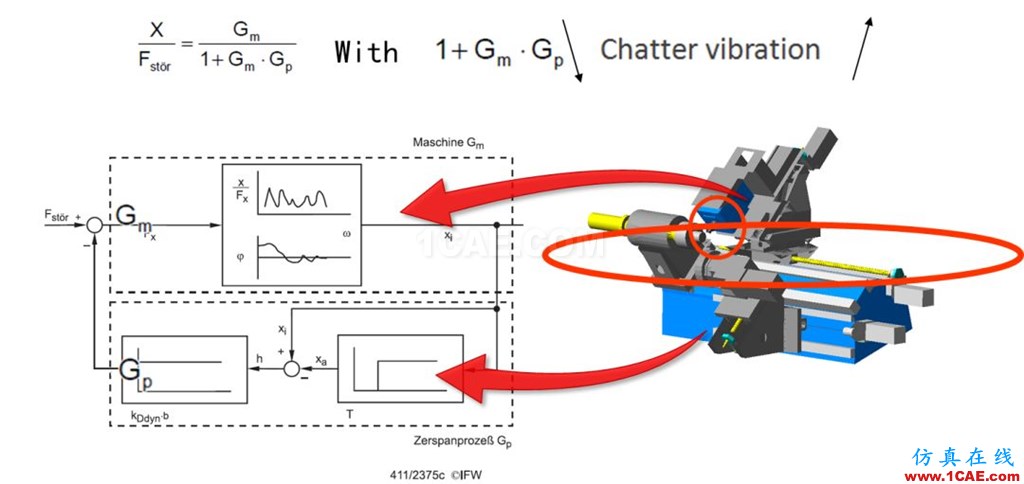
(5)機床顫振分析
-
由機床零部件相互作用的動態行為和切削作用的動態行為引起
-
穩定性判定根據Nyquist標準建立
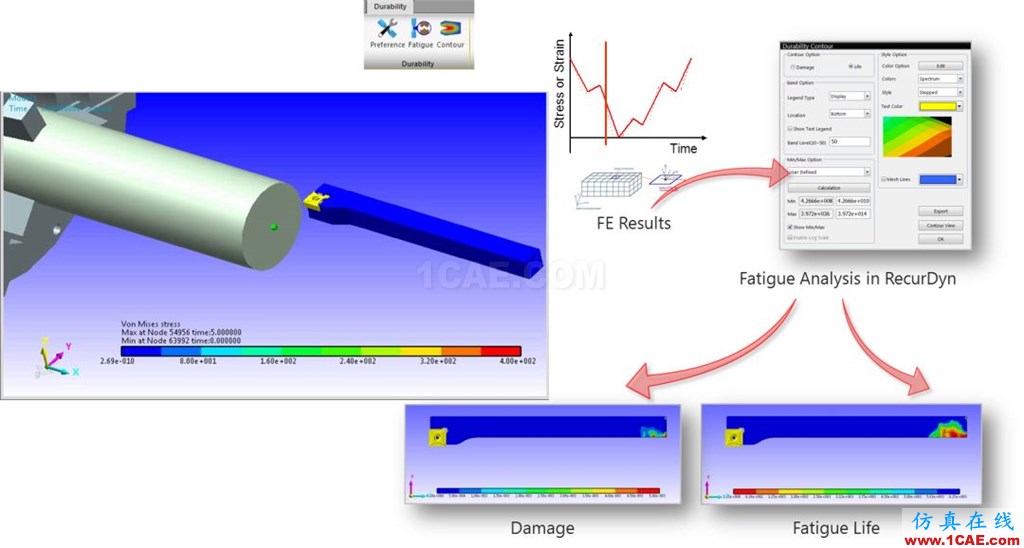
(6)機床零部件疲勞耐久分析
-
系統級的疲勞耐久測試
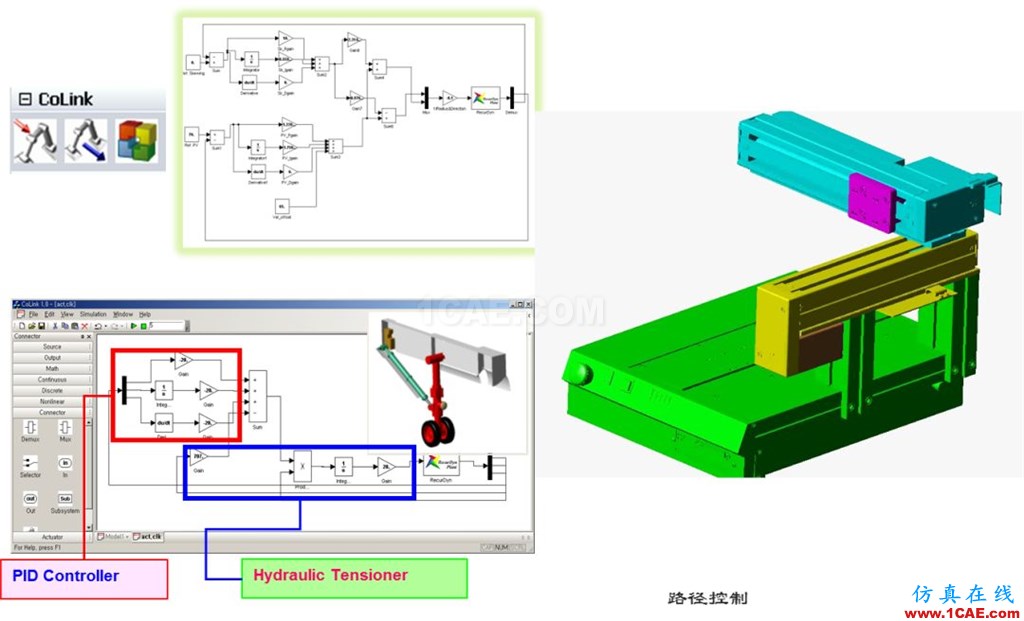
(7)機 - 電 - 控一體耦合技術
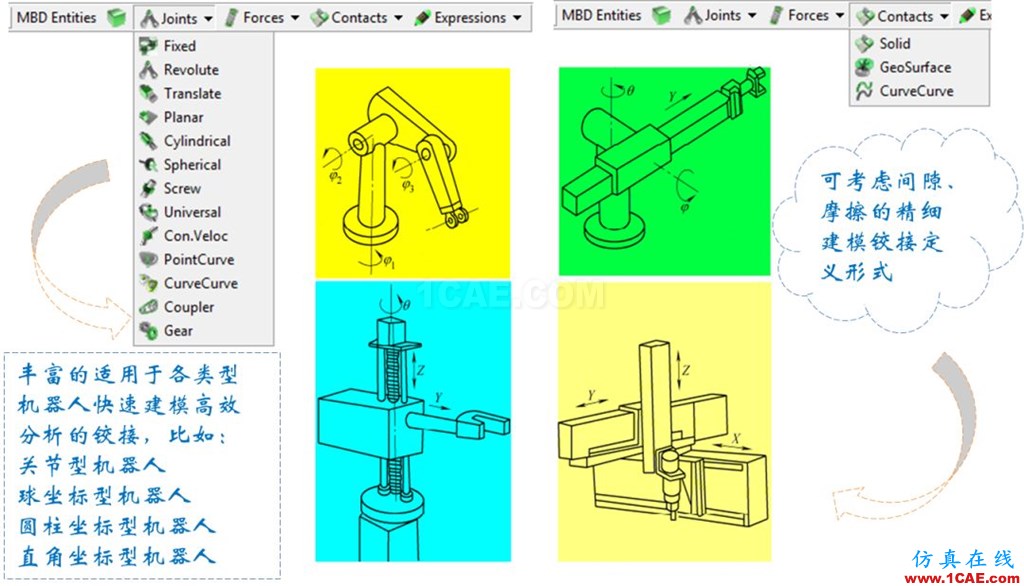
機器人解決方案
-
驗證機器人的運動功能
-
驗證機器人的受力和剛強度
-
驗證機器人傳動系統
-
驗證驅動方式和控制邏輯
-
驗證機器人在作業環境的能力
(1)機器人動剛度及夾持力
-
手臂的結構和尺寸應滿足機器人完成作業任務提出的工作空間要求;
-
減小驅動裝置的負荷,提高手臂運動的響應速度提高運動的精確性和運動剛度。
-
驗證手腕回轉各關節軸上要設置限位開關和機械擋塊能否防止關節超限造成事故?
驗證:
-
末端執行器是否能完成夾持任務?
-
末端執行器對夾持物的加持力是否會造成受損?
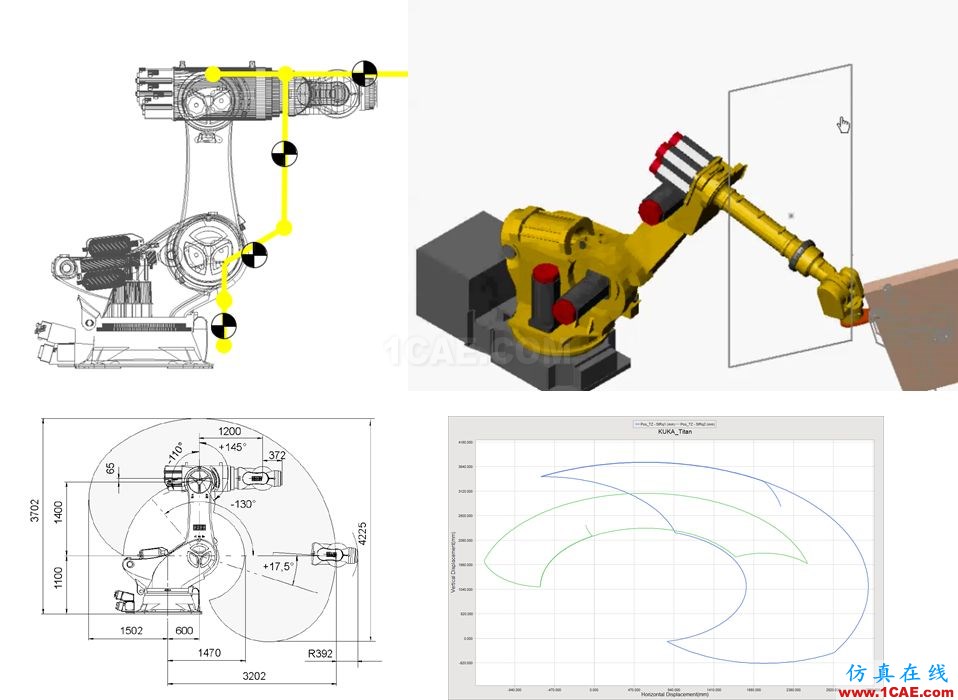
(2)機器人的運動功能
-
根據作業運動功能的要求,確定機器人末端執行器應達到的位置軌跡線和姿態
-
給出各關節運動量,求出機器人的實際工作空間及姿態
-
分析構件的速度和加速度
-
末端執行器上所夾持的工件角速度分析
驗證:
-
作業空間
-
作業路徑
-
速度
-
加速度
-
關節Torque
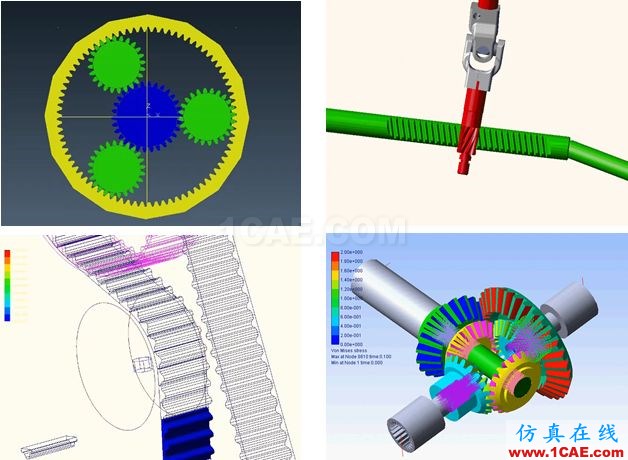
(3)機器人傳動系統
機器人操作機是由若干個構件和關節組成的多自由度空間機構,其運動都是由驅動器經各種機械傳動裝置減速后驅動負載。數字樣機技術可以驗證機器人中常用的機械傳動機構的傳動性能:
-
有齒輪傳動、蝸桿傳動、滾珠絲杠傳動、同步齒形帶傳動、鏈傳動、行星齒輪傳動等
-
鋼帶傳動裝置
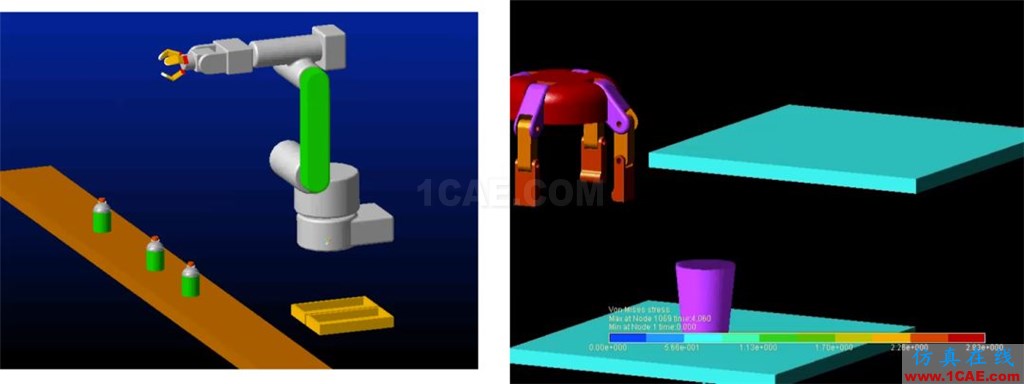
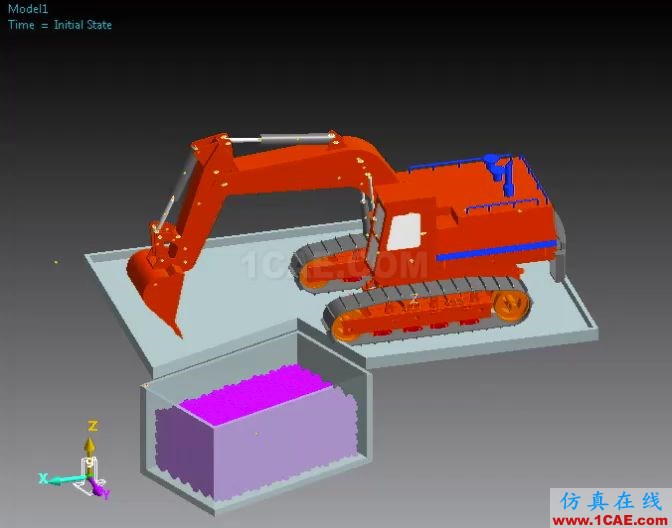
(4)執行機構作業過程的能力驗證
工業機器人是一種生產設備,作業時一般需要有外圍設備完成一些輔助工作。單機形式工作的工業機器人如去鑄件飛邊、刮研、切削加工、焊接等機器人。
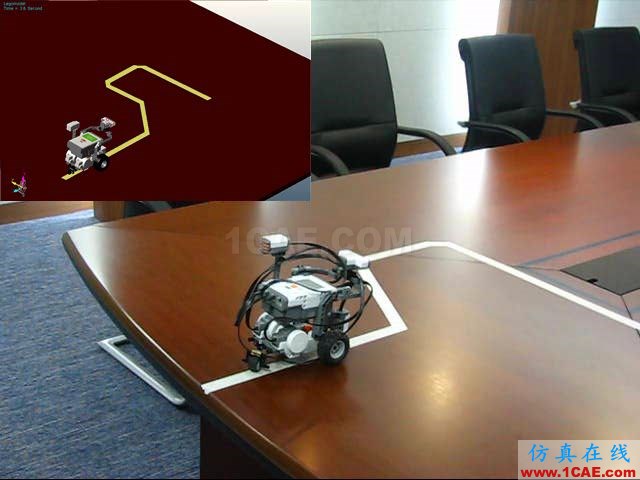
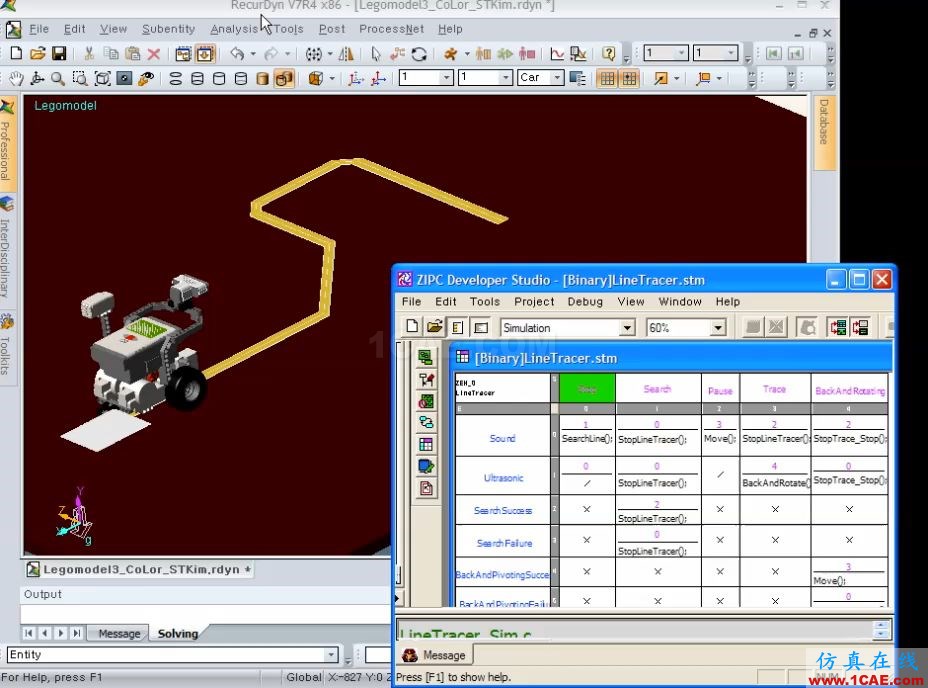
(5)驗證機器人的驅動方式和控制邏輯
數字樣機技術可以通過仿真驗證機器人在驅動方式的動作行為:
-
電動機驅動
-
液壓
-
氣動
相關標簽搜索:行業應用 | 機器人及數控機床研發中的仿真技術應用 Ansys有限元培訓 Ansys workbench培訓 ansys視頻教程 ansys workbench教程 ansys APDL經典教程 ansys資料下載 ansys技術咨詢 ansys基礎知識 ansys代做 Fluent、CFX流體分析 HFSS電磁分析 Abaqus培訓




