
Fluent 動網格實例具體操作
2017-04-15 by:CAE仿真在線 來源:互聯網
在Fluent中,動網格模型可以用來模擬由于流域邊界運動引起流域形狀隨時間變化的流動情況,動網格在求解過程中計算網格要重構,例如汽車發動機中的氣缸運動、閥門的開啟與關閉、機翼的運動、飛機投彈等等。
CFD中的動網格大體分為兩類:
(1)顯式規定的網格節點速度。配合瞬態時間,即可很方便的得出位移。當然一些求解器(如FLUENT)也支持穩態動網格,這時候可以直接指定節點位移。
(2)網格節點速度是通過求解得到的。如6DOF模型基本上都屬于此類。用戶將力換算成加速度,然后將其積分成速度。
在Fluent中,動網格涉及的內容包括:
(1)運動的定義。主要是PROFILE文件與UDF中的動網格宏。
(2)網格更新。FLUENT中關于網格更新方法有三種:網格光順、動態層、網格重構。需要詳細了解這些網格更新方法的運作機理,每個參數所代表的具體含義及設置方法,每種方法的適用范圍。
動網格的最在挑戰來自于網格更新后的質量,避免負體積是動網格調試的主要目標。在避免負網格的同時,努力提高運動更新后的網格質量。
拉格朗日網格(固體有限元計算)
網格
歐拉網格(流體計算)
實例:Profile定義運動
I、參數說明
本次實例采用的場景來自于流體中高速飛行的物體。如子彈、火箭、導彈等。這里只是為了說明profile在動網格運動定義中的應用,因此為了計算方便不考慮高速問題。問題描述如下圖所示:

圖 1 (1為運動剛體,2為計算域)
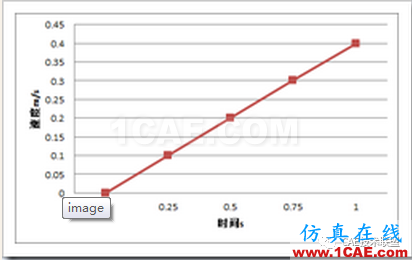
圖2
計算說明:由于不考慮也沒辦法考慮剛體的變形,因此在構建面域的時候,將1中的部分通過布爾運算去除。計算域總長度300mm,其中固體運動最大位移為:
300-40-30-6mm=224mm。
為了防止固體邊界與計算域邊界發生重疊,我們使運動最大距離為200mm。運動速度v=0.4t,這樣可能計算運動完200mm需要的時間為1s。采取5個時間數據點分別為:0,0.25,0.5,0.75,1s,相對應的速度為:0,0.1,0.2,0.3,0.4 m/s。
profile文件如下:
((moveVelocity transient 5 0)
(time 0 0.25 0.5 0.75 1)
(v_x 0 0.1 0.2 0.3 0.4))
解釋:在記事本中按下列格式編寫,保存為.txt文本即可。其中,moveVelocity為profile文件名,transient表示瞬態,5為表示所取速度及時間變化點數,這里取5個點;time后所述為所取點的時刻值;x后所述為所取點的x坐標;v_x為所取點的x向速度;所取的五個點組成速度與時間的線性關系,如圖2所示。
注意:雖然瞬態profile文件可以在一定程度上定義網格運動,然而其存在著一些缺陷。最主要的一些缺陷存在于以下一些方面:
(1)PROFILE無法精確的定義連續的運動。其使用離散的點值進行插值。如果想獲得較為精確的運動定義,勢必要定義很多點。
(2)一些情況下無法使用profile。比如穩態動網格。
在FLUENT中定義網格運動,更多的是采用UDF宏,此處不在詳細敘述。詳細實例可參閱FLUENT UDF手冊p182-p188。
II、 操作步驟
一、將計算域離散為網格
在ICEM CFD中將計算域離散為網格,由于三角形網格非常適合于2D動網格,因此本例使用三角形網格。若要使用四邊形網格,則需要進行滑移面處理。詳細的說明將留待以后網格更新的時候進行。同樣的,也不進行邊界層處理。
簡化問題描述,設定四周為wall壁面,中間區域為rigid wall(如圖3所示),在動網格中進行設定。全局網格尺寸為2mm,運動邊界網格尺寸1mm,
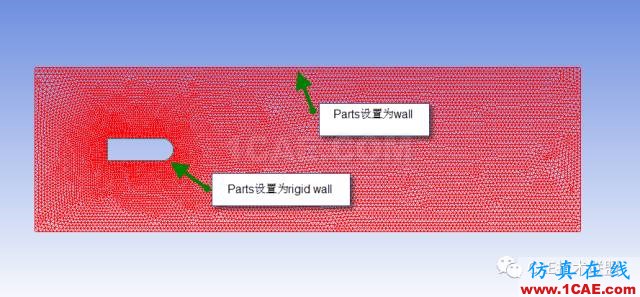
圖3 parts 設置
網格單元總數為:19698
節點總數:9845
二Fluent操作步驟
雙擊桌面上的Fluent圖標,打開啟動對話框,如圖4所示,選擇選擇2D求解器,勾選雙精度選項,點擊OK啟動Fluent 14.5。
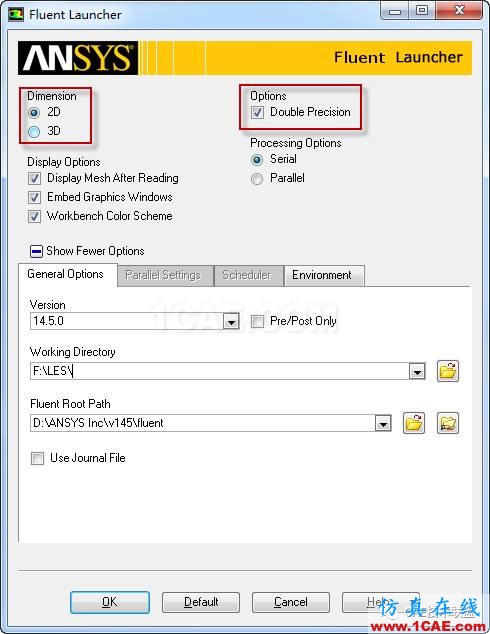
圖4
找到并選擇網格msh文件,完成將網格文件輸入Fluent的操作。檢查并修改單位,點擊General面板中的Scale確保使用的單位為mm,如下圖所示。點擊Check檢查網格質量,注意Minimum Volume應大于0。
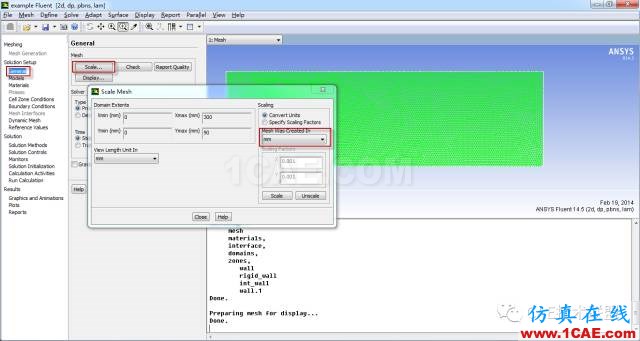
圖5
設置求解器,由于在動網格的應用中,穩態情況比較少見,所以選擇瞬態求解器,General中的其它選項采取默認設置,如下圖所示。
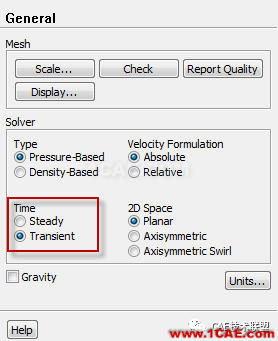
圖6
選擇Models面板中的標準k-e湍流模型,如下圖所示。
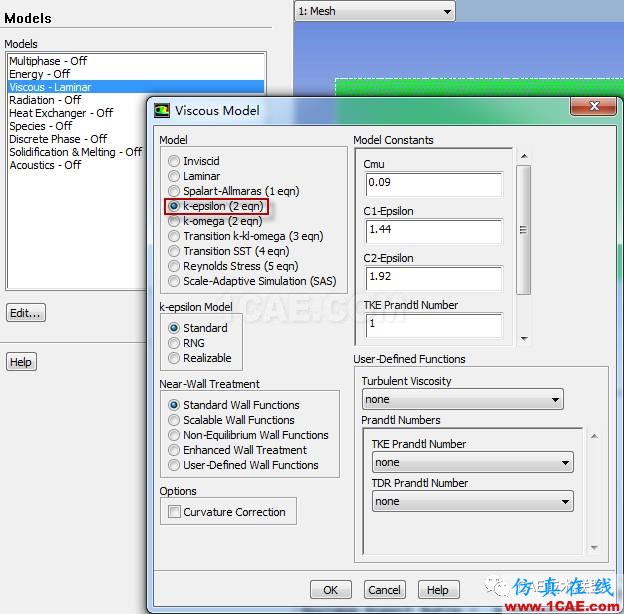
圖7
選擇Materials面板中的air,打開材料設置對話框,如下圖所示,將液體材料改為水,具體操作如下。
在Name欄內輸入water。
在屬性欄內輸入流體的物理屬性如下:
密度 1000

動力黏度 0.01

等壓比熱 4182

導熱系數 0.6

點擊Close
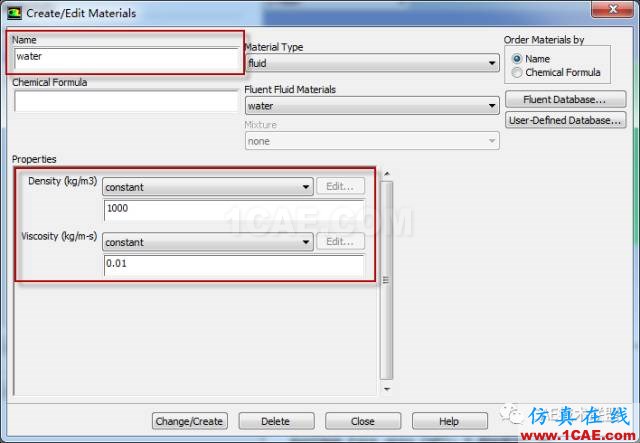
圖 8
設置工作流體為水,即設定Cell Zone Condition將默認域介質設定為water,具體操作如下。
在Zone欄內選擇Edit,即編輯默認域設定,打開Fluid設置對話框,如下圖所示。
在Materials Name下拉列表中選擇water。
點擊OK,關閉材料選擇對話框。
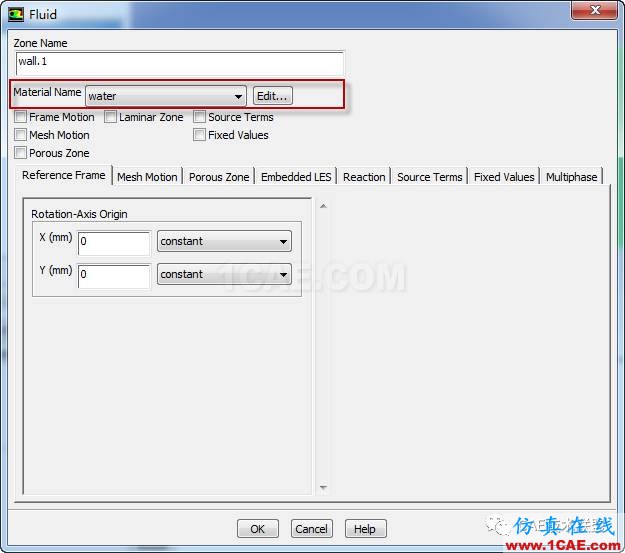
圖9
由于本例使用全封閉計算域,所有邊界類型為wall,所以Boundary Condition采用默認設置即可。將編輯好的輪廓文件(profile)導入到Fluent中,具體操作如下。
單擊選擇Boundary Condition面板中的Profile選項,打開Profile設置對話框,如下圖所示。
點擊Read,在文件類型中選擇All Files,選擇profile文件儲存成文本文檔text的形式。
點擊Apply,關閉Profile設置對話框。

圖10
6.1 Mesh Methods(網格更新方法)
在Dynamic Mesh面板中找到Dynamic Mesh選項,并勾選激活動網格選項。勾選Mesh Methods目錄下的Smoothing,Layering,Remeshing選項。各選項的參數設置分別如下圖所示。
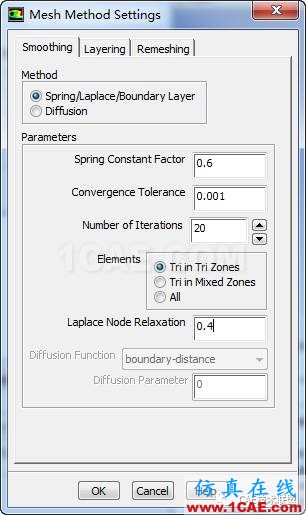
在Smoothing中,有兩種網格光順的方法,彈簧光順與離散光順兩個模型。激活彈簧光順模型,相關參數設置位于Smoothing(光順)標簽下,可以設置的參數包括Spring Constant Factor(彈簧彈性系數)、Laplace Node Relaxation(邊界點松弛因子)、Convergence Tolerance(迭代精度)和Number of Iterations(迭代次數)。
彈簧常數因子:取值范圍[0,1]。可以通過該值來調整彈簧剛度的大小。該值為0表示彈簧間沒有阻尼,邊界運動會影響到更多的內部節點。該參數的默認值為1。在實際應用中,若發現運動邊界附近網格堆積嚴重,可適當調小此參數,將位移擴散出去。
邊界點松弛因子:網格位置更新時使用的參數。取值范圍[0,1]。0表示沒有進行網格節點保持不變,1表示不使用松弛處理。該參數默認為1。調整該參數可以控制每次網格更新的節點位置。通常使用默認值即可。
迭代精度:網格節點位移值是通過求解平衡方程得到的。本參數即控制方程的求解精度。一般保持默認值。
迭代次數:與迭代精度作用相同。用于平衡方程的求解控制。迭代方程如下。通常該參數保持默認即可。
擴散光順方法在此不作詳細敘述,只簡述其適應的情況:能夠應用于任何類型的運動或變形網格;擴散光順方法比彈簧光順計算開銷要大(隱式求解擴散方程,而彈簧光順是顯式計算節點位移),但是能夠得到較好的網格質量(特別是對于非四面體/非三角形網格及多面體網格);更適合于平移運動;擴散光順方法與邊界層光順方法及面區域重構方法不兼容。
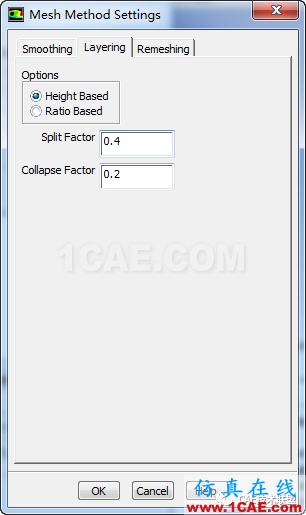
在Layering(動態層)標簽下,可以設置與動態層模型相關的參數。Split Factor (分割因子)和Collapse Factor(合并因子)與Dynamic Mesh Zones中的Cell Height相關,定義其乘積下的分割與合并屬性。
在Remeshing(重劃網格)標簽下,設置與局部重劃模型相關的參數。ANSYS Fluent包含有很多種網格重構方法,主要有以下幾種:局部單元重構、局部區域重構、局部面重構(只用于3D)、面域重構、cutcell域重構(僅3D)以及2.5D面重構(3D中)。網格重構方法適合于以下網格類型:
(1)局部網格及局部面重構方法只對區域中的三角形及四面體網格有效。(例如混合網格區域中,非三角形/四面體網格將會被忽略)
(2)區域重構方法會將其它所有類型網格替換為三角形四面體網格(分別在2D及3D區域中),并且在3D邊界層中生成楔形、棱柱形網格。
(3)面域重構方法在2D中只用于三角形網格,在3D模型中只用于四面體網格。并且在3D邊界層中能夠產生楔形/棱柱形網格。
(4)切割單元區域重構方法能夠對所有網格類型有效。
(5)2.5D重構方法只在六面體網格或由三角形拉伸形成的楔形/棱柱型單元上有效。
可以設置的其他參數還包括Maximum Cell Skewness(最大畸變率)、Maximum Cell Volume(最大網格體積)和Minimum Cell Volume(最大網格體積),主要用于確定哪些網格需要被重新劃分。Mesh Scale Info用于設定時參考網格內的參數。在缺省設置中,如果重新劃分的網格優于原網格,則用新網格代替舊網格;否則,將保持原網格劃分不變。如果無論如何都要采用新網格的話,則可以在Options(選項)下面選擇Must Improve Skewness(必須改善畸變率)選項。如果Options(選項)下面的Size Function(尺寸函數)被激活,則還可以用網格尺寸分布函數標志需要重新劃分的網格。
對于3D模型,還包括in-cylinder、six-dof、Implicit Update三種選項。其中in-cyliner用于發動機氣缸模擬,six-dof主要用于流體作用于剛體,預測剛體運動。implicit update用于設定網格更新方式。默認采用顯式方式,勾選此選項可設定網格以隱式方式更新。
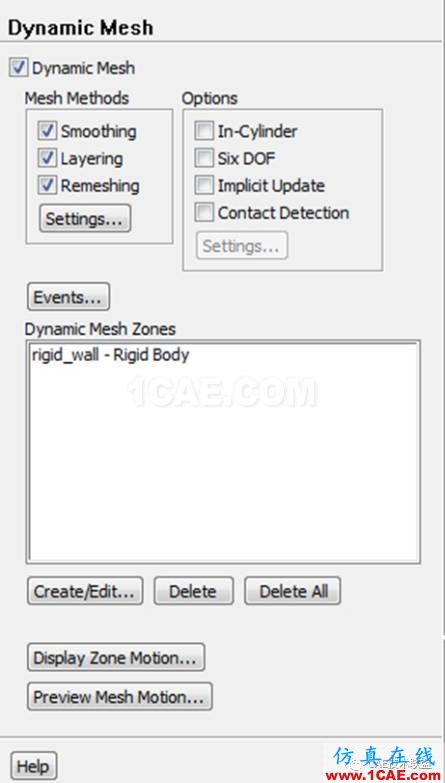
6.2 動態網格域
在Dynamic Mesh Zones中定義運動區域,即定義中間剛體壁面為rigid body,具體操作如下。
點擊Create/Edit選項,打開Dynamic Mesh Zones設置對話框,如下圖所示。
在Zone Names下選擇rigid wall,在Type中選擇Rigid Body。
在Meshing Options中,設置Cell Height中的值為1mm。
點擊Create,并關閉Dynamic Mesh Zones設置對話框。
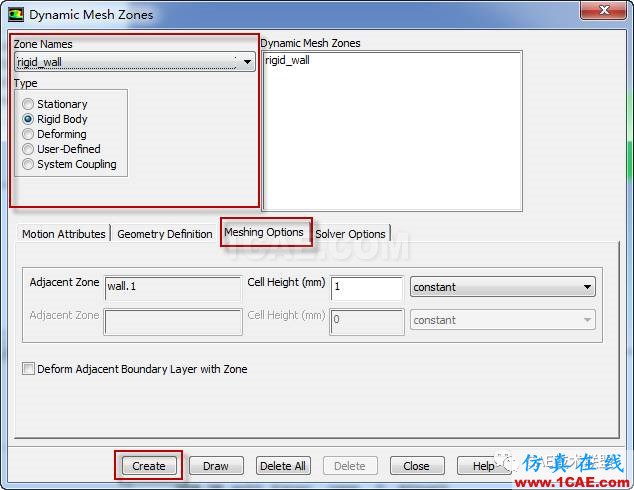
圖11
此動態網格域用于定義網格運動的區域及運動類型。FLUENT中網格運動類型主要有:靜止、剛體運動、變形區域、用戶自定義域、耦合域(依次)。
靜止域在網格運動過程中,區域內節點位置保持不變。雖然說默認情況下不設定區域運動,則該區域為靜止,但是一些情況下還是需要顯式設定某些區域為靜止域,尤其是在一些與剛體域相連的區域處理上。
剛體運動域:這是fluent動網格中最常見的運動類型。通過規定剛體的速度或位移來控制運動。
變形域:由于邊界運動導致節點變形。變形域通常與剛體域是相連的。
自定義域:用戶可以使用UDF定義自己需要的域
耦合域:節點位移由耦合求解器計算,在流固耦合計算中,耦合面上通常設定為耦合域類型。
6.3 網格預覽
點擊Preview Mesh Motion可以設置預覽網格運動,具體操作如下。
點擊Preview Mesh Motion選項,打開設置對話框。
設置時間步長和步數,具體設置如下圖所示。
設置完成后,點擊Preview。
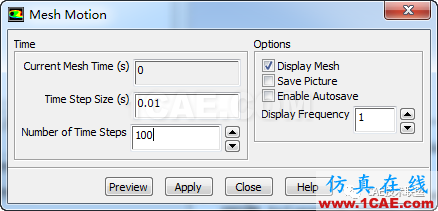
圖 15
注意:在這一步中,需要提醒一下,使用動網格進行正式計算之前,最好養成預覽動網格更新的習慣;就是在正式計算前,瀏覽一下動網格的更新情況,這樣可以避免在計算過程中出現動網格更新本身的問題。在預覽更新時,很多人都說會出現負體積的警告,更新不成功,出現這樣的問題時,最好先把時間步長改的更小點兒試試,一般來講,排除UDF本身的原因,出現更新出錯的原因都與時間步長有關,這需要結合所使用的更新方法多琢磨。在預覽動網格前先保存動網格設置,預覽后將造成不可逆的計算結果。
對于非定常問題,推薦使用PISO算法。時間步長設置為0.01,計算步數設置為100。Solution面板中的設置此處不在詳細敘述。
相關標簽搜索:Fluent 動網格實例具體操作 Fluent培訓 Fluent流體培訓 Fluent軟件培訓 fluent技術教程 fluent在線視頻教程 fluent資料下載 fluent分析理論 fluent化學反應 fluent軟件下載 UDF編程代做 Fluent、CFX流體分析 HFSS電磁分析




